
About Me
I am a Research Associate at the Institute for Photogrammetry, University of Stuttgart, where I work on RGB-only dense SLAM leveraging pretrained monocular priors and 3D Gaussian Splatting for high-fidelity geometry and appearance reconstruction. In parallel, I am pursuing my PhD in Photogrammetry, advised by Prof. Norbert Haala, focusing on improving the accuracy and robustness of dense visual SLAM through multi-sensor fusion, deep learning, and radiance-field representations.
Previously, I was a PhD Researcher at Huawei Munich Research Center (2020–2024), where I developed NeRF-based implicit representations for real-time monocular SLAM and proposed a multi-fisheye dense SLAM pipeline that won the Hilti SLAM Challenge 2022 cash prize. Before that, I worked as a Software Developer at Robert Bosch GmbH (2017–2020), contributing to “Bosch Road Signature”, a crowdsourced mapping and localization service for automated vehicles.
📰 News
- 2025.10: 🎉 Our paper HI-SLAM2: Geometry-Aware Gaussian SLAM for Fast Monocular Scene Reconstruction is accepted by IEEE Transactions on Robotics (T-RO)!
- 2024.01: 🎉 Our paper HI-SLAM: Monocular Real-Time Dense Mapping with Hybrid Implicit Fields is accepted by IEEE Robotics and Automation Letters (RA-L).
- 2023.01: 🎉 Our paper BAMF-SLAM: Bundle Adjusted Multi-Fisheye Visual-Inertial SLAM Using Recurrent Field Transforms is accepted by ICRA 2023.
- 2022.05: 🏆 Won the Cash Award at Hilti SLAM Challenge 2022 in the vision-only track!
📝 Publications
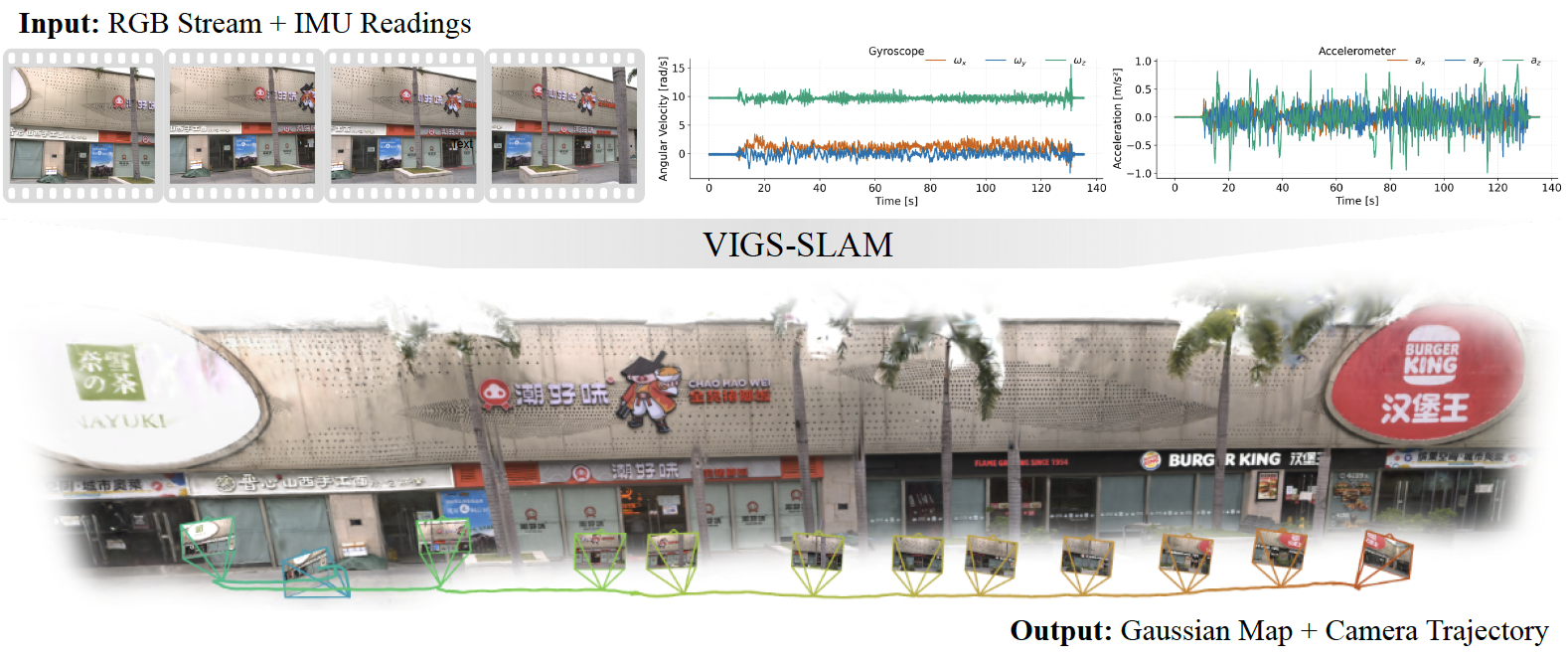
VIGS-SLAM: Visual Inertial Gaussian Splatting SLAM
Zihan Zhu, Wei Zhang, Norbert Haala, Marc Pollefeys, Daniel Barath
arXiv, 2025 | Project
- A tightly-coupled Visual-Inertial SLAM system with 3D Gaussian Splatting for real-time dense reconstruction.
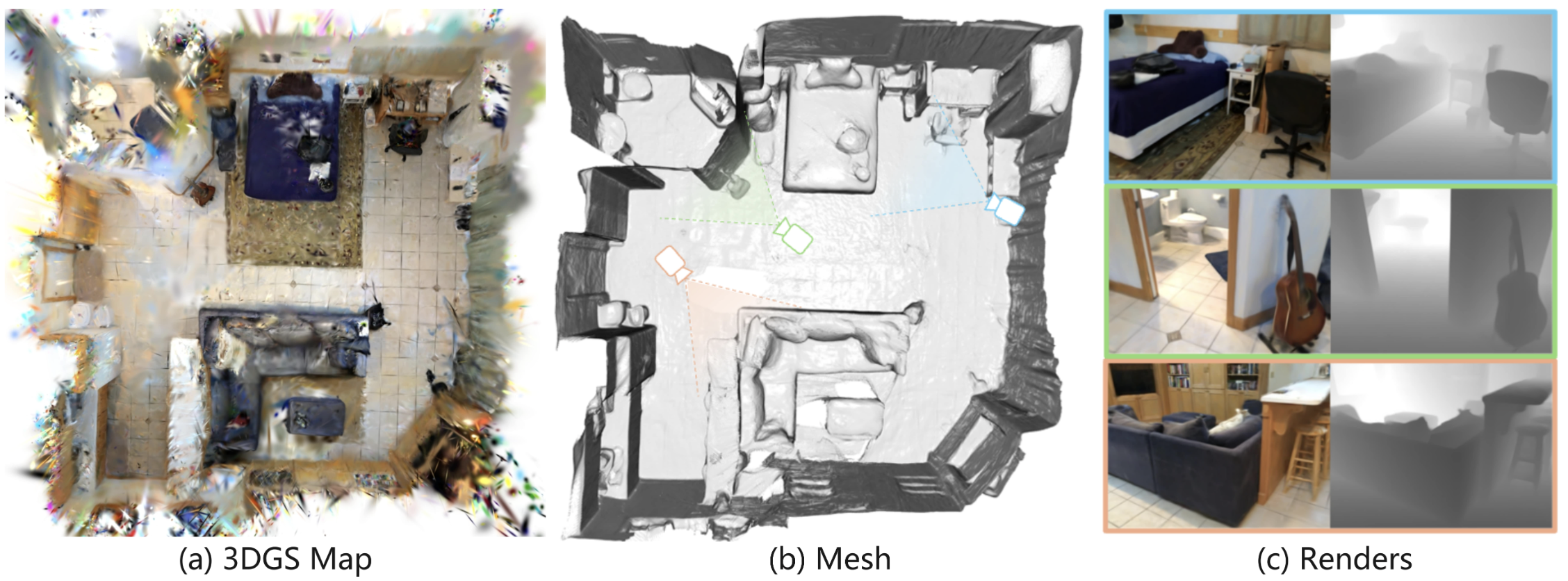
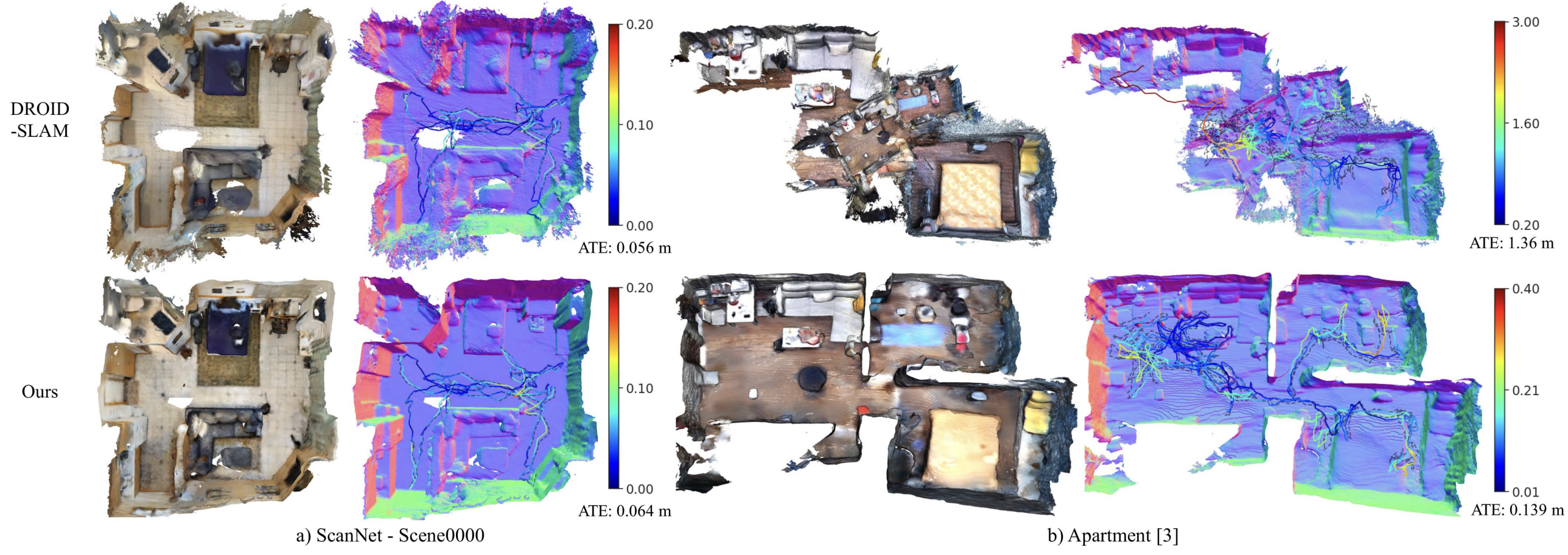
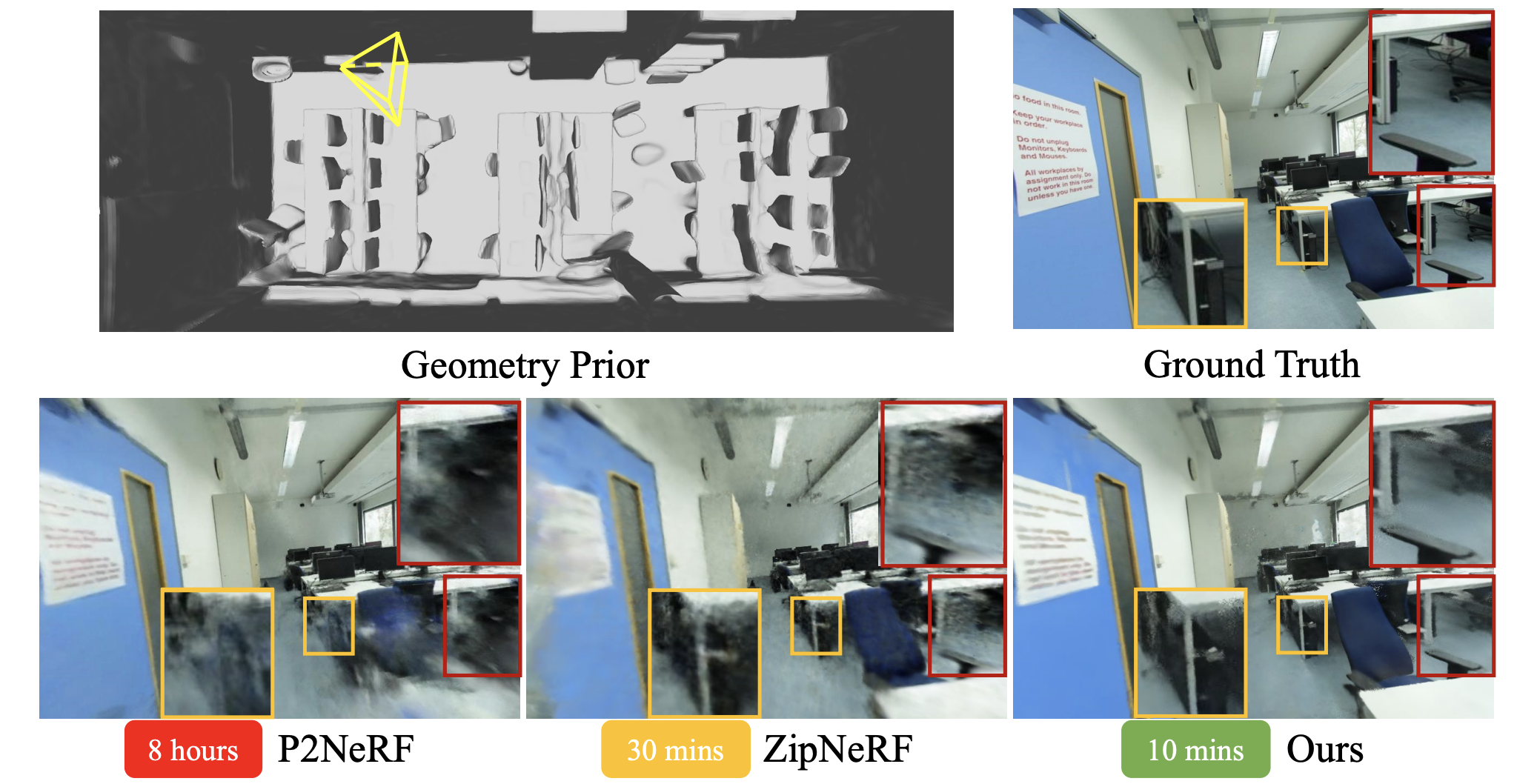
HI-SLAM2: Geometry-Aware Gaussian SLAM for Fast Monocular Scene Reconstruction
Wei Zhang, Qing Cheng, David Skuddis, Niclas Zeller, Daniel Cremers, Norbert Haala
T-RO, 2025 | Project
- Geometry-aware Gaussian SLAM enabling fast monocular scene reconstruction with high-fidelity geometry and appearance.
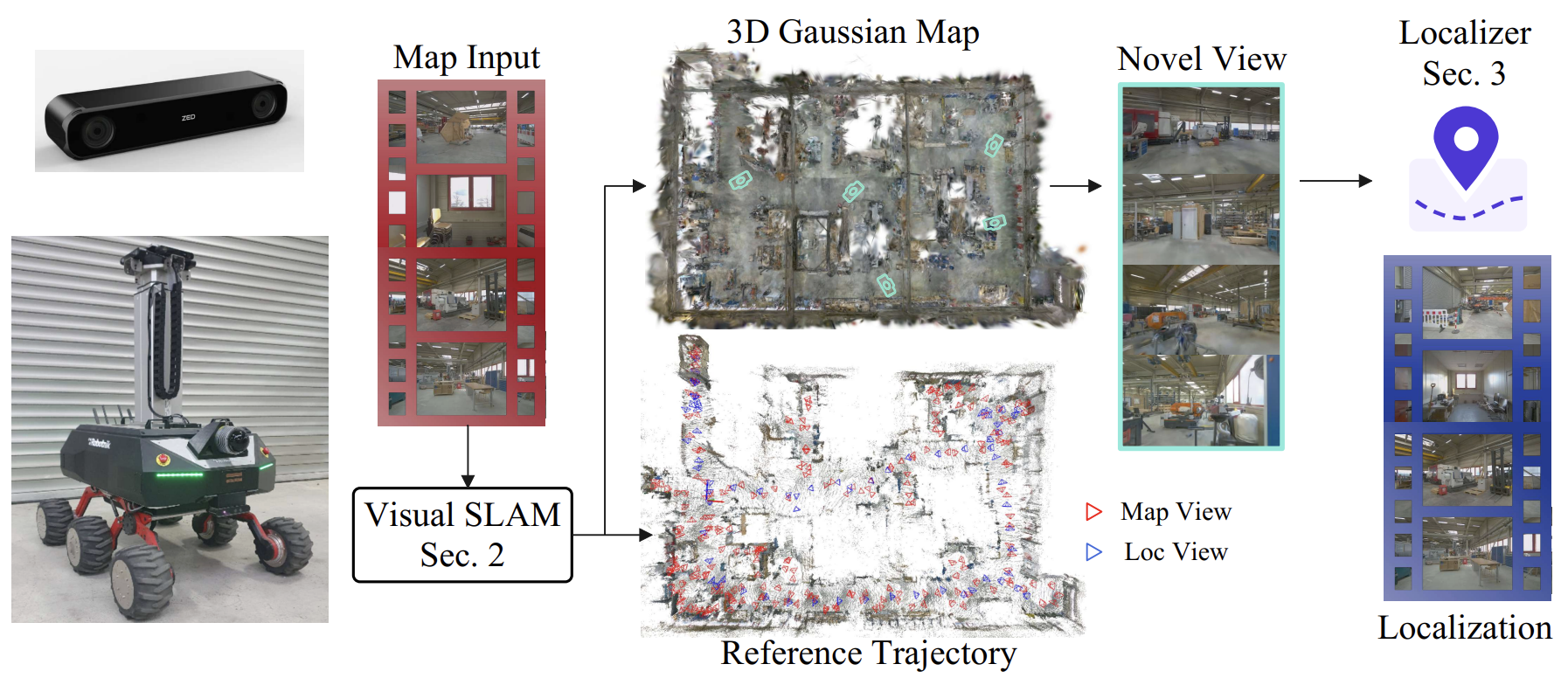
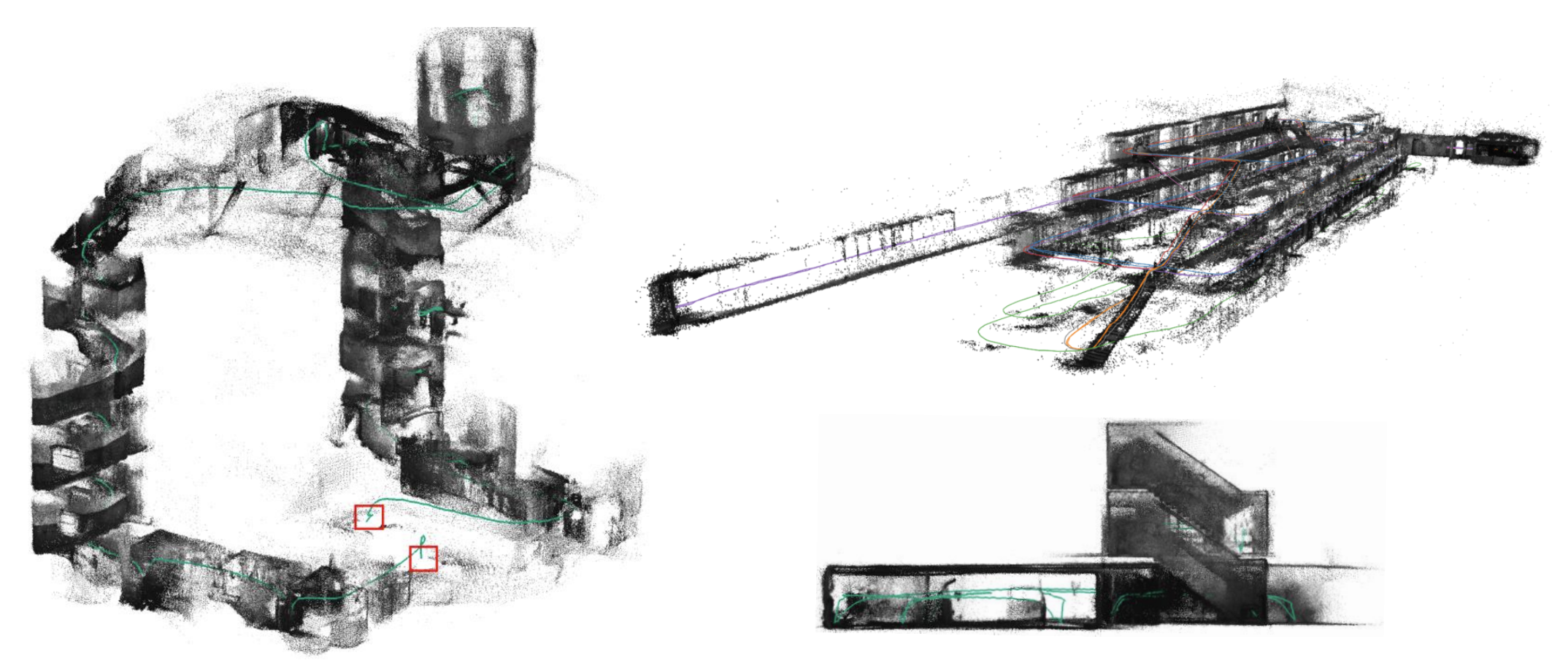
3D Gaussian Splitting aided Localization for Large and Complex Indoor-Environments
Vincent Ress, Jonas Meyer, Wei Zhang, David Skuddis, Uwe Soergel, Norbert Haala
ISPRS Annals, 2025
- Leveraging 3D Gaussian Splatting for robust localization in large and complex indoor environments.
HI-SLAM: Monocular Real-Time Dense Mapping with Hybrid Implicit Fields
Wei Zhang, Tianyuan Sun, Shuhong Wang, Qing Cheng, Norbert Haala
RA-L, 2024 | Project
- Real-time dense mapping from monocular images using hybrid implicit neural representations.
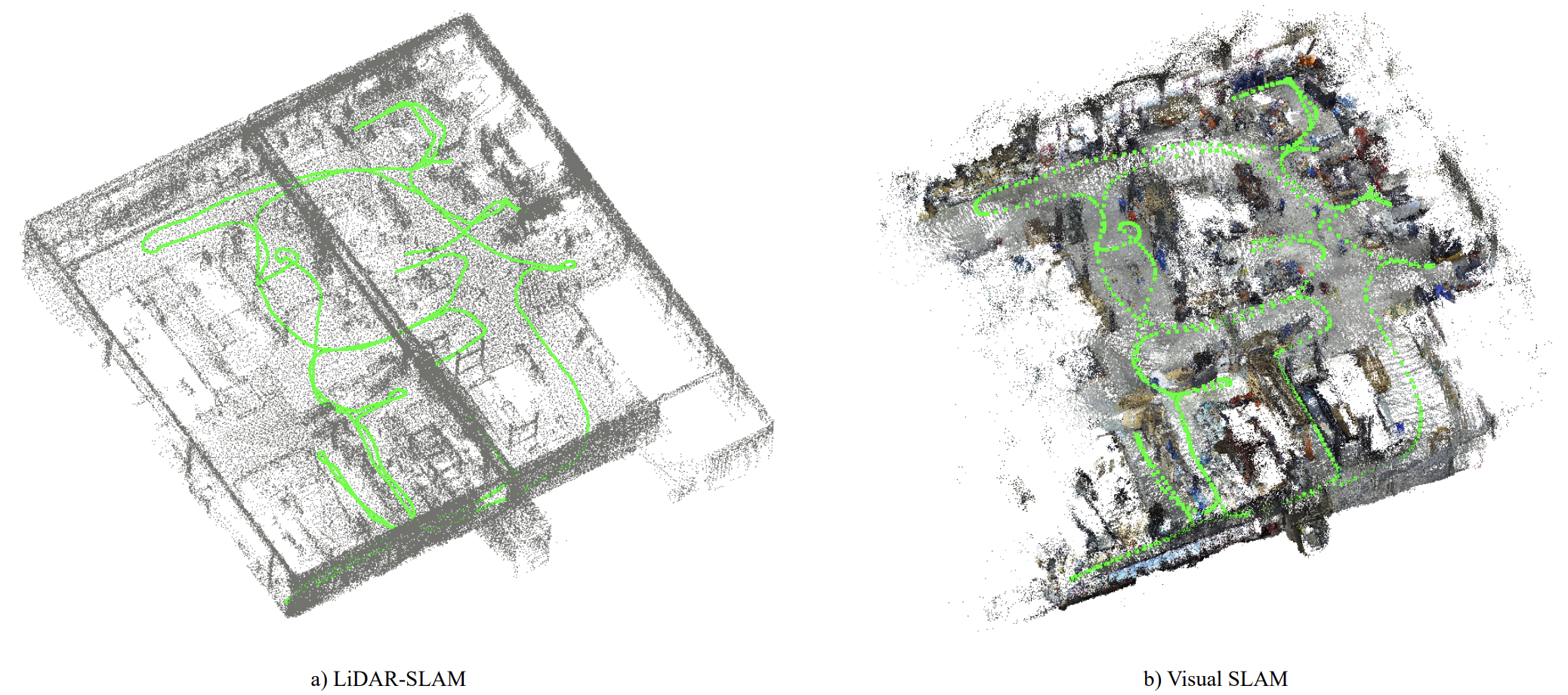
SLAM for Indoor Mapping of Wide Area Construction Environments
Vincent Ress, Wei Zhang, David Skuddis, Norbert Haala, Uwe Soergel
ISPRS Annals, 2024
- SLAM system designed for mapping wide area construction environments with high accuracy.
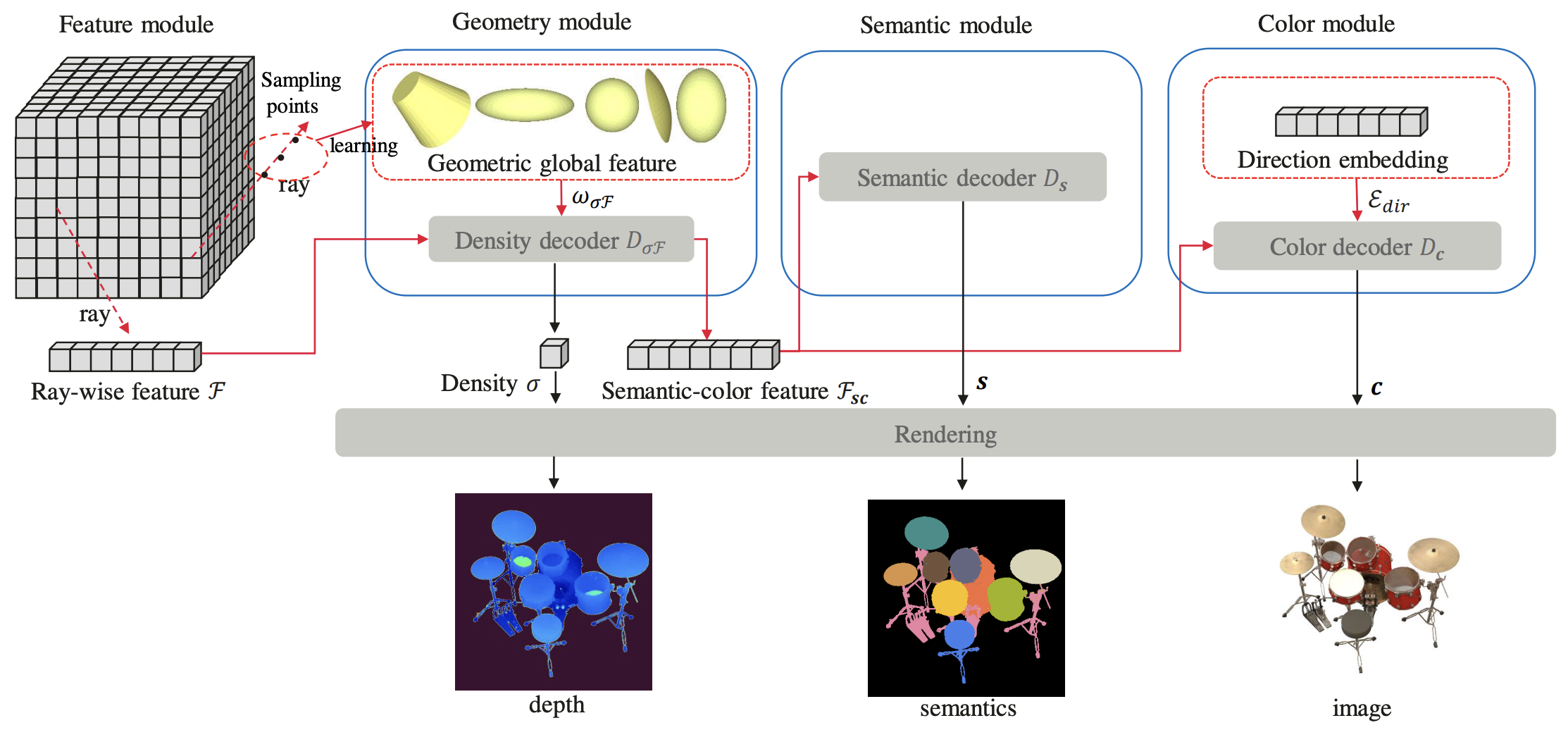
IS-NEAR: Implicit Semantic Neural Engine and Multi-Sensor Data Rendering With 3D Global Feature
Tiecheng Sun, Wei Zhang, Xingliang Dong, Tao Lin
3DV, 2024 | Project
BAMF-SLAM: Bundle Adjusted Multi-Fisheye Visual-Inertial SLAM Using Recurrent Field Transforms
Wei Zhang, Sen Wang, Xingliang Dong, Rongwei Guo, Norbert Haala
ICRA, 2023 | Project
VoxNeRF: Bridging Voxel Representation and Neural Radiance Fields for Enhanced Indoor View Synthesis
Sen Wang, Qing Cheng, Stefano Gasperini, Wei Zhang, Shun-Cheng Wu, Niclas Zeller, Daniel Cremers, Nassir Navab
RA-L, 2023
Towards Robust Indoor Visual SLAM and Dense Reconstruction for Mobile Robots
Wei Zhang, Sen Wang, Norbert Haala
ISPRS Annals, 2022